1. 下载原料
下载 Visual Studio 并安装:http://www.visualstudio.com/downloads/download-visual-studio-vs
如果会使用 Git,推荐安装 Github Desktop:https://desktop.github.com/
下载 Python 并安装(推荐安装 3.5 版本):https://www.python.org/downloads/
2. 克隆代码
本项目的 Github 项目主页是:https://github.com/ArduPilot/MissionPlanner
· 只希望编译一次
点击 Download ZIP,并解压代码在没有中文的目录中
· 使用常规方法 
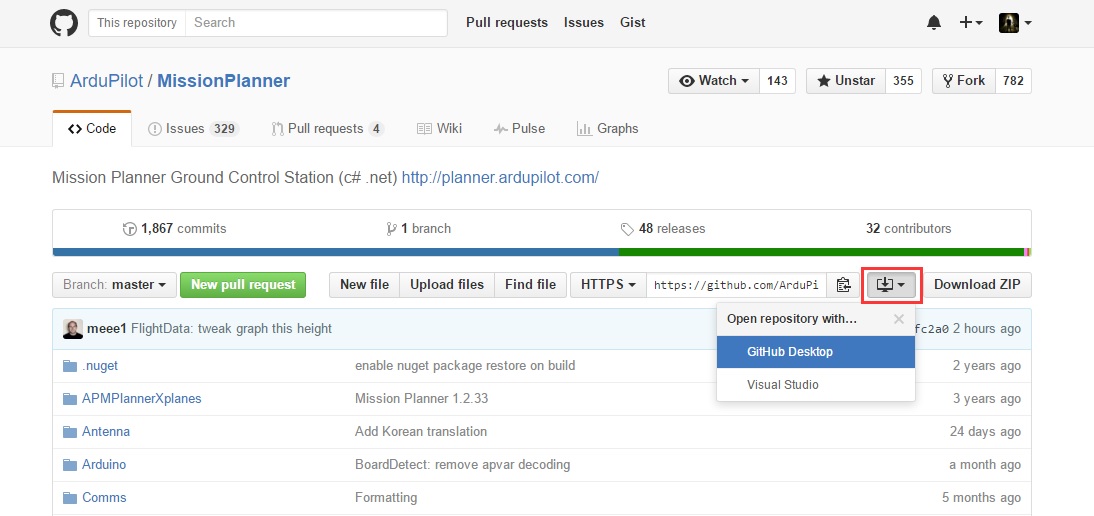
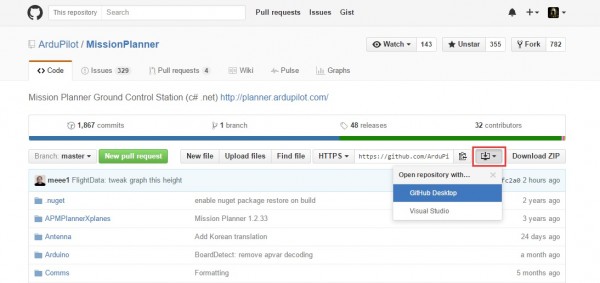
点击克隆图标,选择 Github Desktop(推荐)或 Visual Studio
3. 确认环境
· Python
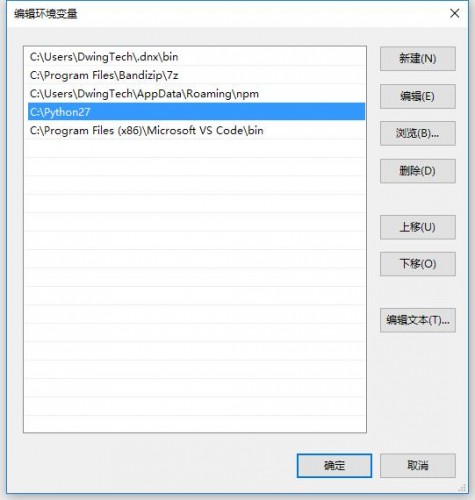
首次安装完请先重启。打开 CMD,输入 Python,如果成功进入了 Python,说明 Python 已配置完成。如果不正常,请右击此电脑 > 系统> 高级系统设置> 高级> 环境变量,请确保 Python 的安装目录已经添加在其中(图以 2.7 版本为例),如果没有,请手动添加并重启。

4. 编译
打开根目录下的项目文件 MissionPlanner.sln,点击上方的启动,看到很多的错误请勿惊慌,那是因为 Mavlink.cs 还没有生成。从 1.3.36 起,Mavlink.cs 文件会在每次编译的时候使用 Python 自动生成,如果编译多次仍因错误导致无法运行,请点击生成中的重新生成解决方案。
如果错误列表中的错误与 “Microsoft.DirectX.DirectInput” 相关,请安装 DirectX 9。
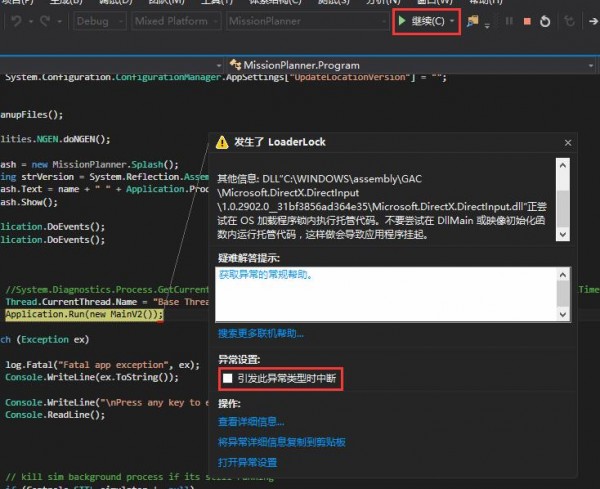
首次 Debug 时可能会提示 “发生了 LoaderLock”,请取消勾选引发此异常类型时终端,并点击继续

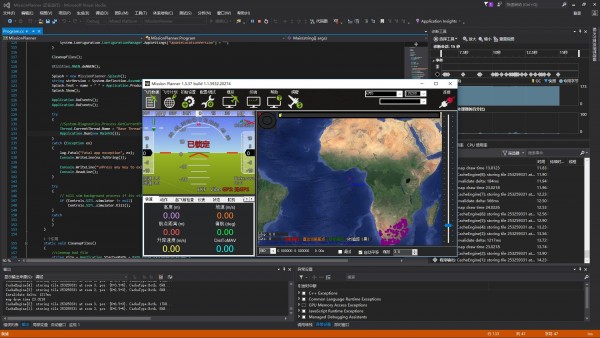
好了,MP 已经编译并运行成功

如果碰到了问题,请对照本文确保每一个点都看到,如果是本文中未提及的问题,请打开输出窗口查看编译输出,寻找错误点并修正。请不要按照网络上的老教程修改项目属性等!
5. 关于天书
本人为 Mission Planner 和 Tower(手机地面站)中文本地化,并持续贡献代码,看官可以扫描右边二维码打赏给我动力,请备注需要在 MP 关于中留下的赞助人名称,非常感谢。如需联系我,可以在 APM 中文网交流群中找到四季天书。我的邮箱:skitisu(at)gmail.com。
再多说一句,本软件使用 GNU 授权,改版的时候,至少保留名字哦~而且 GNU 是要求二次开发也再次开源的哦~

Comments | 2 条评论
貌似我不装 python 也可以